



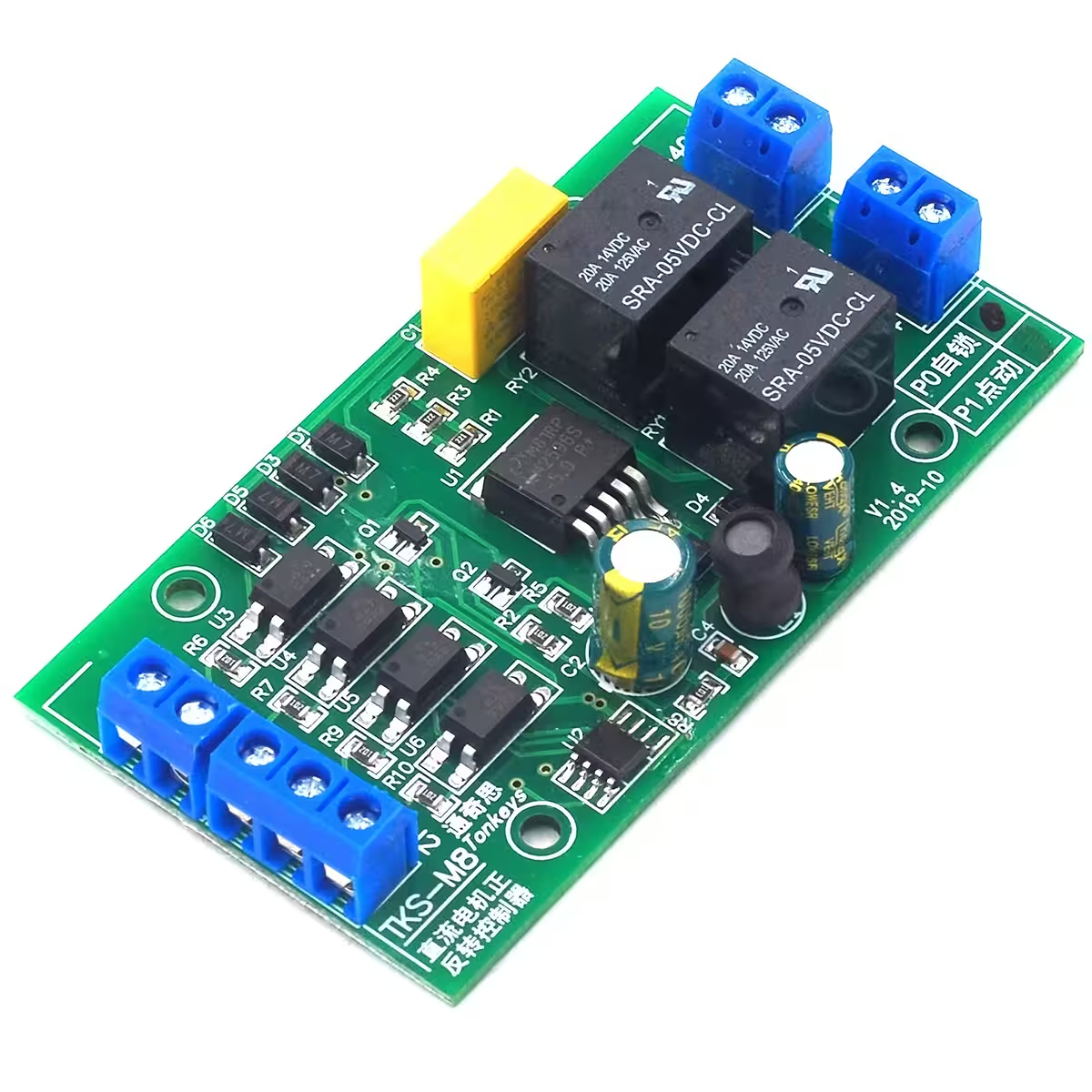
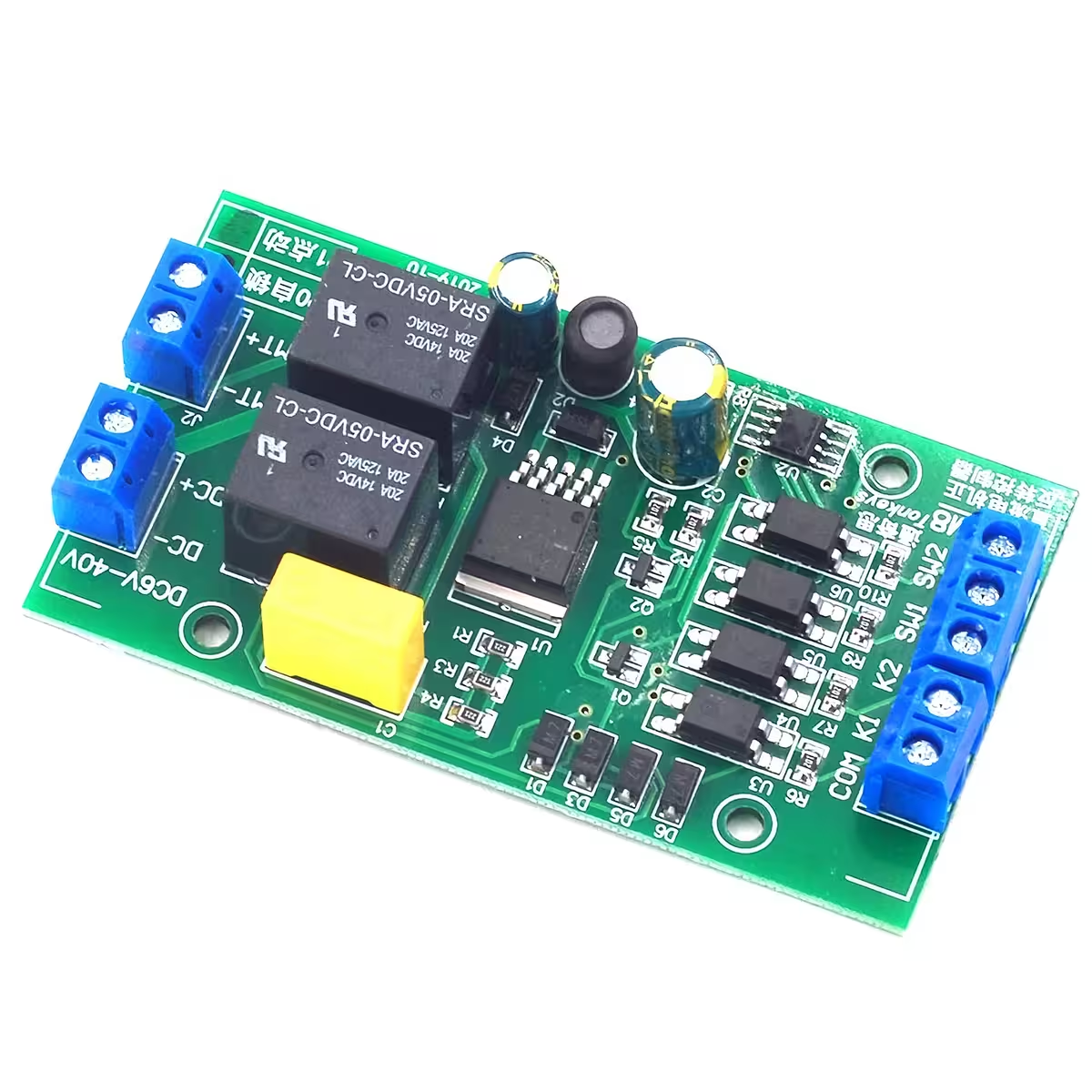
DC regulátor směru motoru – ovládání pohybu vpřed/vzad bez externích komponent
Máte lineární pohon, reverzní mechanismus nebo vlastní DIY projekt, který vyžaduje přesné řízení směru otáčení? Bez specializovaného modulu byste se museli trápit s relé, tranzistory a složitou kabeláží. Tento DC regulátor směru motoru vše řeší v jednom kompaktním celku: stačí připojit napájení, motor a tlačítka – a během pár minut můžete začít.
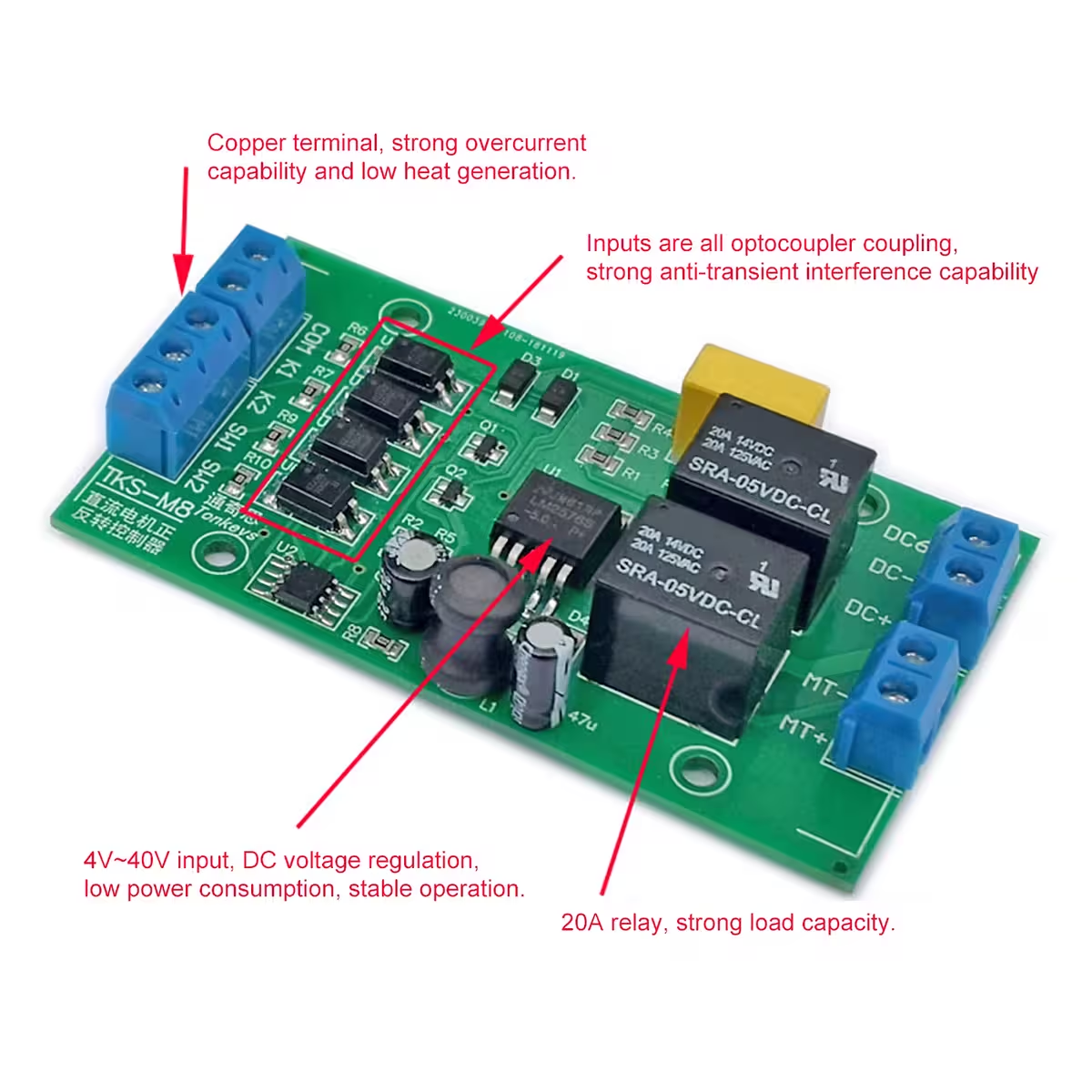
Poznámka: Motor je napájen stejným napětím, jaké přivedete na vstup regulátoru. Regulátor neumožňuje změnu výstupního napětí.
Proč zvolit tento model? (Klíčové výhody):
- Široký rozsah napětí: 4–40V DC — funguje s LiPo bateriemi, laboratorními zdroji i průmyslovými adaptéry bez nutnosti úprav
- Výstupní proud až 20A — zvládne motory s vysokými rozběhovými proudy, vhodné pro zátěže do cca 80W
- Dva volitelné režimy: PO a P1 — vyberte si mezi samočinným během (start krátkým impulsem) a jog režimem (běží pouze při držení tlačítka)
- Univerzální active-low vstupy — připojíte přímo běžná tlačítka, mechanické spínače typu NO nebo 3-vodičové NPN senzory bez nutnosti dalších rezistorů
- Integrované koncové spínače SW1/SW2 — automatické zastavení v krajních polohách eliminuje riziko mechanického zablokování nebo přetížení
- Životnost >150 000 sepnutí — vysoká spolehlivost pro každodenní opakované cykly
- Nízká vlastní spotřeba: 0,6W aktivní / 0,1W standby — minimální odběr z baterie v pohotovostním režimu
Detaily a výkon
Regulátor využívá architekturu active-low vstupů: vstup se aktivuje, jakmile napětí na něm klesne pod 2V. To znamená, že běžná tlačítka, mechanické spínače NO (spínací kontakt) a NPN-NO senzory připojíte přímo bez jakýchkoliv mezikusů.
Reakční doba je ≈20ms pro příkazy K1/K2 a ≈50ms pro koncové spínače SW1/SW2 — dostatečně rychlé pro dynamické aplikace a zároveň dostatečně stabilní, aby nedocházelo k falešným sepnutím.
Při vyšších napětích doporučujeme proudovou zátěž snížit: při 12V můžete využít plných 20A, zatímco při 24V doporučujeme limit cca 10A pro dlouhodobý tepelný provoz. Vždy používejte vhodně dimenzovanou pojistku a kabely odpovídající zátěži.
| Parametr | Hodnota / Detail |
|---|---|
| Provozní napětí | DC 4–40V (doporučeno 6–36V) |
| Max. výstupní proud | až 20A (při 12V) |
| Doporučený výkon motoru | do cca 80W |
| Vlastní spotřeba (aktivní) | cca 0,6W |
| Vlastní spotřeba (standby) | cca 0,1W |
| Typ vstupního signálu | Active-low (aktivní při napětí < 2V) |
| Reakční doba K1/K2 | ≈ 20ms |
| Reakční doba SW1/SW2 | ≈ 50ms |
| Provozní režimy | PO (samočinný) / P1 (jog) |
| Životnost | >150 000 sepnutí |
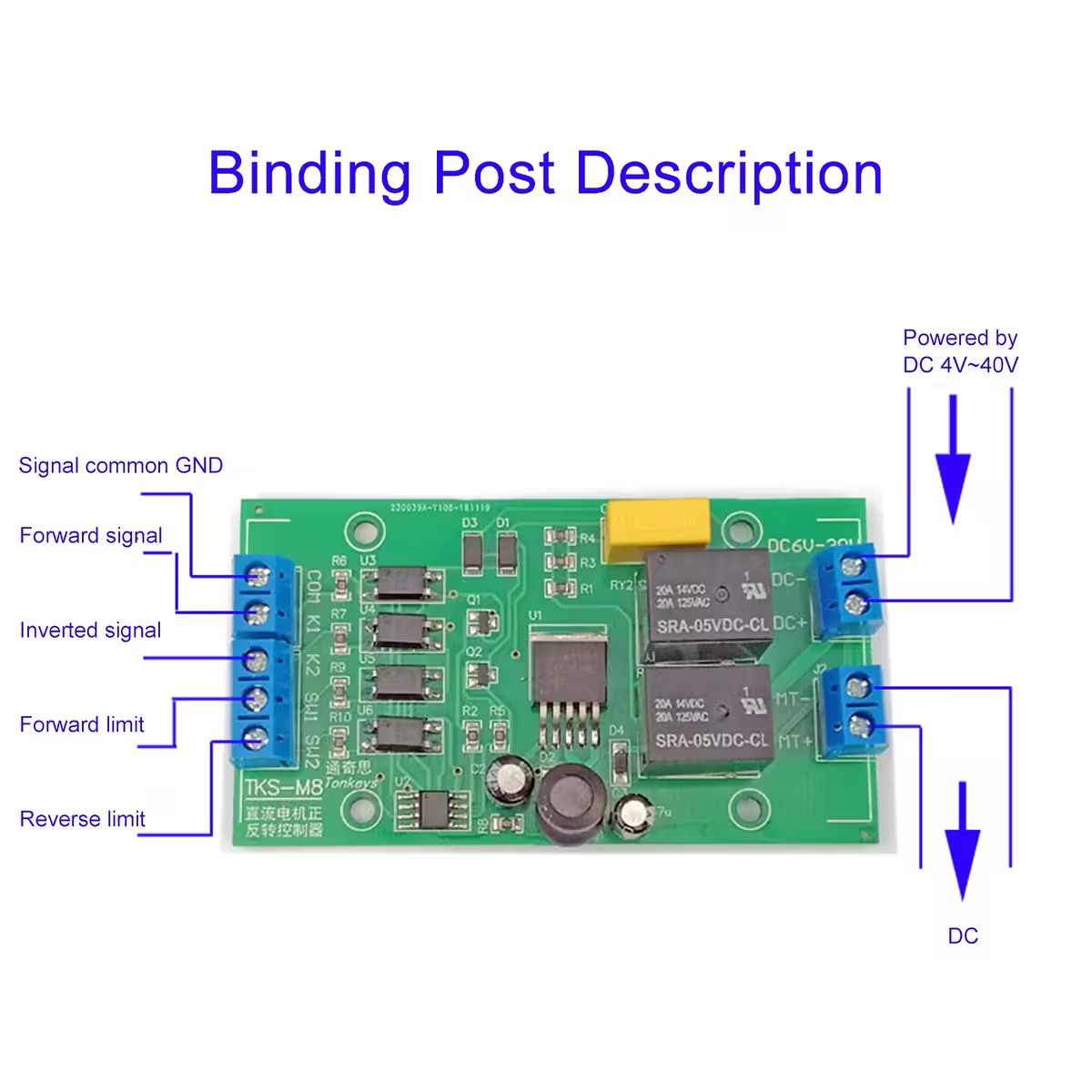
| Vstup K1 | Příkaz vpřed (active-low) |
| Vstup K2 | Příkaz vzad (active-low) |
| SW1 | Koncový spínač vpřed (doporučeno NO) |
| SW2 | Koncový spínač vzad (doporučeno NO) |
| VIN+ / VIN- | Napájení modulu DC 4–40V |
| Motor+ / Motor- | Výstup pro DC motor |
Programování a použití
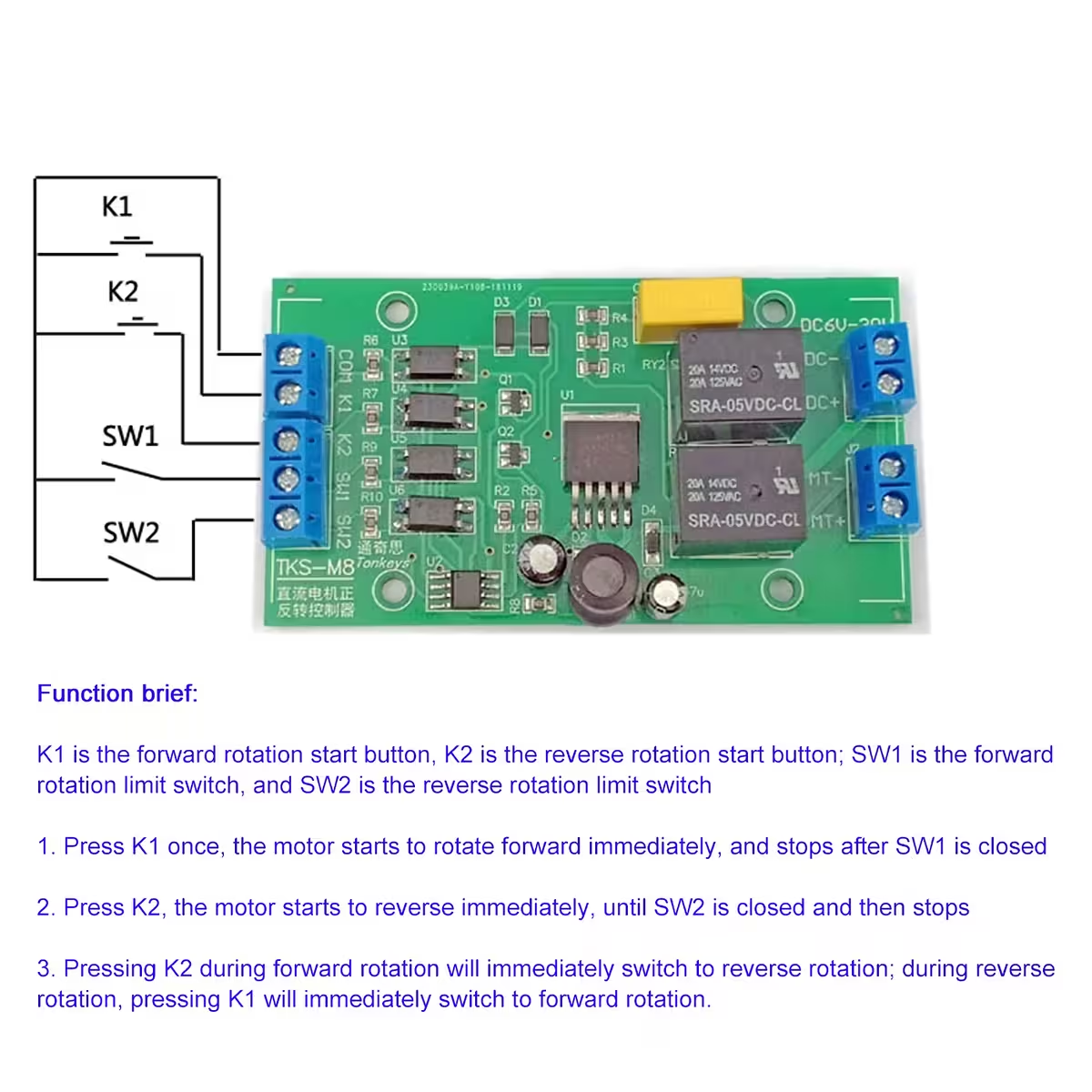
Režim PO (Samočinný): Krátký impuls na K1 nebo K2 spustí motor. Ten běží samostatně, dokud nenarazí na koncový spínač nebo neobdrží opačný příkaz. Ideální pro automatizaci.
Režim P1 (Jog): Motor běží pouze po dobu, kdy je příkaz K1 nebo K2 aktivní. Ideální pro jemné nastavení a ruční polohování.
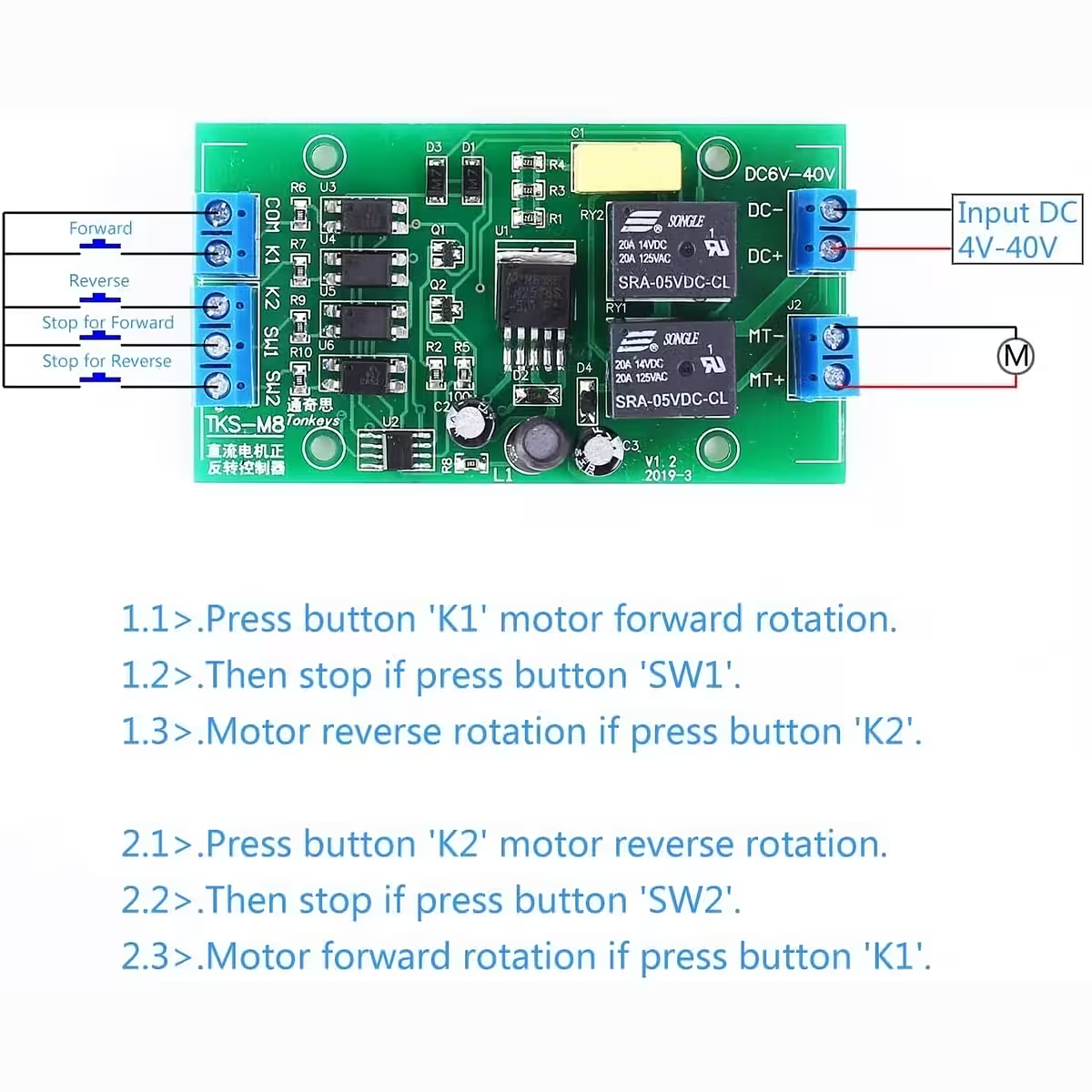
- Připojte napájecí zdroj na VIN+ a VIN– (dodržte polaritu).
- Připojte DC motor na Motor+ a Motor–.
- Zvolte provozní režim: PO pro samočinný chod nebo P1 pro jog.
- Připojte tlačítka nebo řídicí signály na K1 (vpřed) a K2 (vzad) — vstupy jsou active-low.
- Volitelně připojte mechanické spínače nebo NPN-NO senzory na SW1 a SW2.
- Pro automatický cyklický pohyb A→B→A: propojte výstupy NO spínačů z polohy A na K1 a z polohy B na K2, vstupy SW1/SW2 nechte nezapojené.
- Pro integraci s Arduino: propojte GND Arduina s GND regulátoru, digitální piny pro směr vpřed/vzad připojte na K1 a K2. Piny nastavte jako OUTPUT a pro aktivaci pošlete LOW.
- Vždy zkontrolujte rozběhový proud motoru a na napájecí vedení instalujte vhodnou pojistku.
Obsah balení
- 1 × DC regulátor směru motoru (Forward / Reverse), režimy PO/P1
Často kladené dotazy
Co znamená active-low a proč je to důležité?
Vstup se aktivuje, když napětí klesne pod 2V — tedy při spojení se zemí (GND). Běžná tlačítka, NO spínače a NPN senzory fungují přesně takto. Nepotřebujete žádné další rezistory ani invertory.
Jaký je rozdíl mezi režimem PO a P1?
V režimu PO stačí krátký impuls pro spuštění motoru, který běží až do konce dráhy. V režimu P1 motor běží pouze po dobu stisknutí tlačítka, což je skvělé pro přesné ruční polohování.
Lze regulátor připojit přímo k Arduinu?
Ano. Propojíte GND Arduina a regulátoru a použijete dva digitální piny nastavené jako OUTPUT. Logiku řeší Arduino, výkon regulátor — vše bez nutnosti dalších komponent.
Mohu použít spínače s rozpínacím kontaktem (NC)?
Regulátor je optimalizován pro NO (spínací) kontakty. NC kontakty by obrátily logiku a způsobily nežádoucí chování. Pro SW1 a SW2 používejte vždy NO kontakty.
Je při maximálním proudu nutný chladič?
Při proudech blížících se 20A nebo při intenzivním cyklování zajistěte dostatečné větrání a sledujte teplotu modulu. Pro trvalou zátěž doporučujeme přidat malý chladič nebo aktivní ventilaci.
Jak vytvořit automatický cyklický pohyb bez časovače?
Propojte NO spínače z polohy A na K1 a z polohy B na K2 (vstupy SW1/SW2 nechte volné). Při dosažení krajní polohy spínač automaticky aktivuje opačný směr — motor bude oscilovat bez potřeby dalšího řízení.
Video prezentace
Galerie












Recenze
Zatím zde nejsou žádné recenze.